Computational system for analyzing and fabricating deployable structures through parametric modeling, kinematic simulation and hybrid digital fabrication.
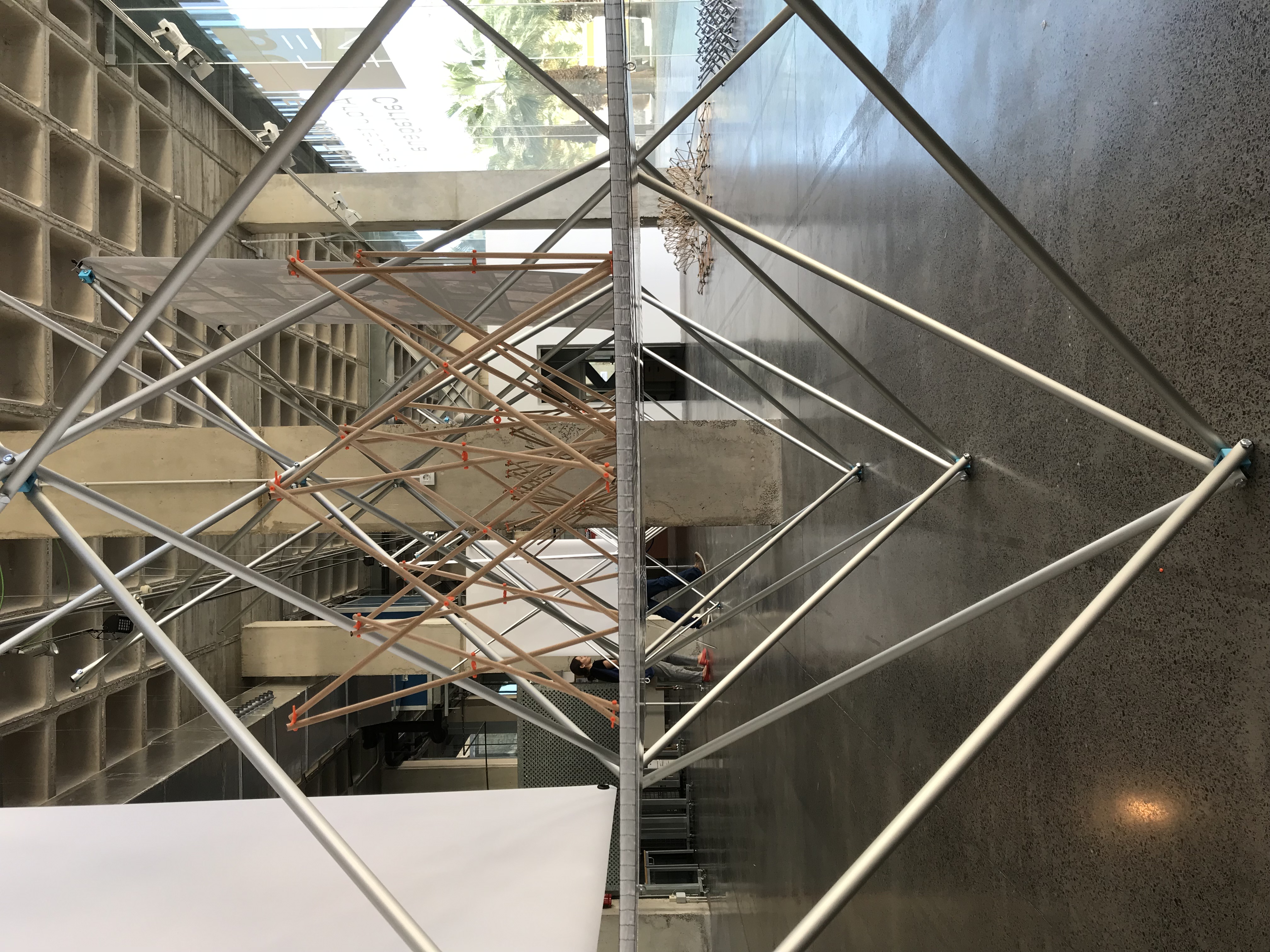
This system was developed to explore deployable structural systems through parametric modeling and kinematic simulation. The workflow studies how articulated bars and joints interact to produce dynamic structures capable of transforming their geometry through coordinated movement.
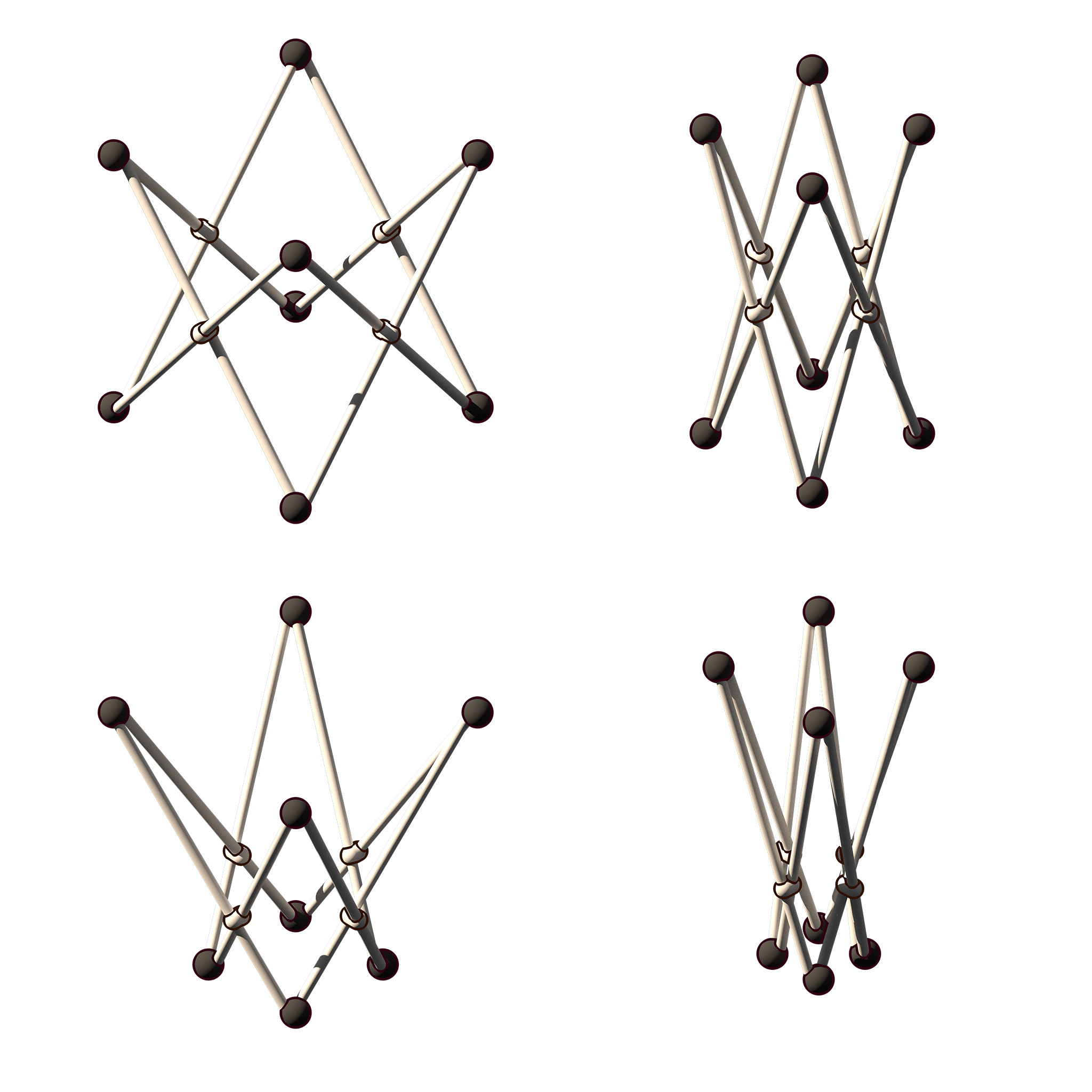
By defining relationships between bar lengths, node positions and articulation angles, the system allows the generation and evaluation of deployable structural configurations. The computational model supports both the simulation of structural movement and the preparation of components for digital fabrication.
Designing deployable structures requires coordinating structural articulation, geometric constraints and fabrication feasibility.
Key technical challenges included:
• Defining parametric relationships between structural bars and articulated joints
• Simulating coordinated kinematic movement within the structure
• Managing structural stability during deployment and transformation
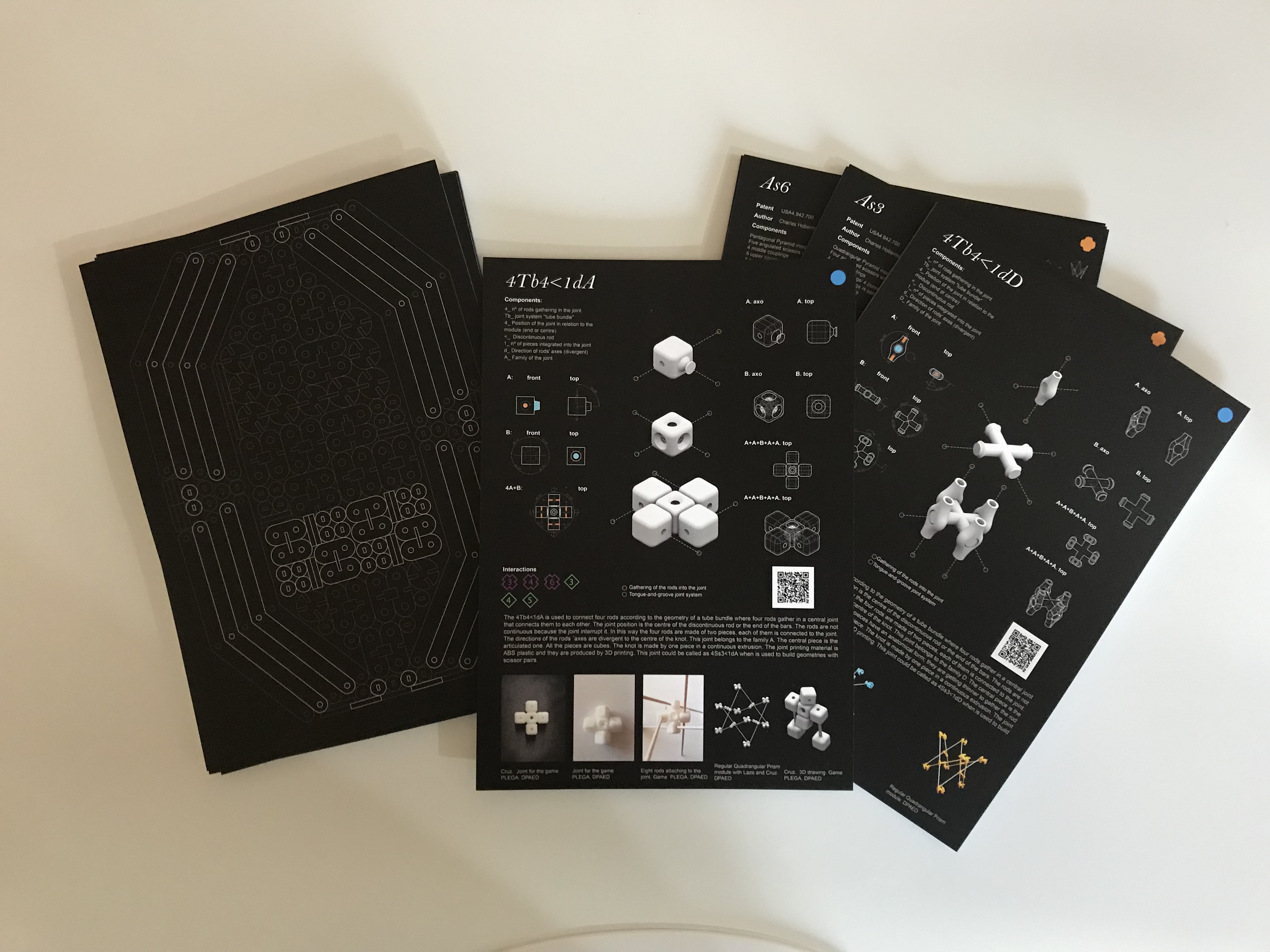
• Designing joints capable of supporting complex articulations
• Translating the computational model into manufacturable components
The project resulted in a computational workflow for designing and fabricating deployable structural systems.
The system generates structural configurations in Rhino and Grasshopper, simulates articulated movement through parametric relationships and produces fabrication-ready components for digital manufacturing.
The workflow provides:
• Parametric generation of deployable structural systems
• Simulation of articulated structural movement
• Integration of kinematic analysis within the design process
• Hybrid fabrication using CNC-cut elements and 3D printed joints
• Buildable components for experimental structural prototypes